
순서
I. 컨베이어 트래킹 개요
II. 컨베이어 트래킹 원리
III. 필요한 기능들
IV. 프로젝트 목표
I. 컨베이어 트래킹 개요
컨베이어 트래킹은 산업 현장에서 컨베이어 위에서 흘러가는 물체를 추적한다는 의미이다.
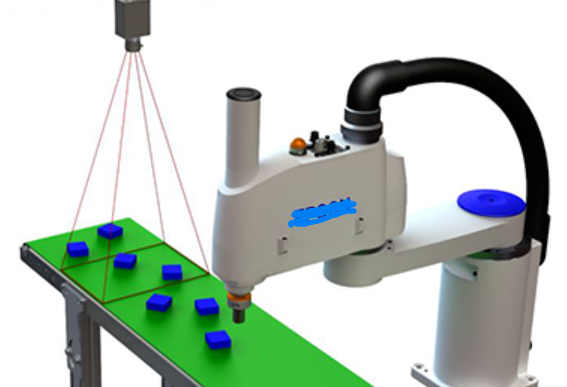
1. 흘러가는 물체의 위치를 추적하여 순식간에 집어 올리거나 (Delta Robot 특화)
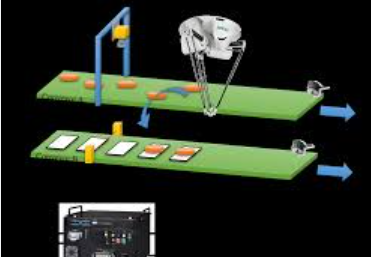
2. 컨베이어와 같은 속도로 움직이며 기타 작업을 한다. (산업, 협동로봇)
ex) 스크류 볼트 체결

여기서 핵심은 컨베이어가 멈추지 않고 끊임없이 진행되는 점이다.
컨베이어로부터 (정확히는 컨베이어에 연결된 엔코더로부터)
Encoder Count 데이터를 이용해 로봇이 컨베이어에 대해 작업하는 것을
컨베이어 트래킹 기술이라고 부른다.
이는 공정 자동화에 핵심 기술이며 얼마나 정확하게, 정밀하게 작업을 할 수 있는지가
성능의 척도가 된다.
II. 컨베이어 트래킹 원리
컨베이어 트래킹 원리는 다음과 같다.
0. 컨베이어에 연결된 엔코더가 로봇에 매 Cycle Encoder Pulse를 전달하는 상태.
-> 이 데이터로 현재의 위치 및 컨베이어의 속도를 계산할 수 있다.
1. 컨베이어 - 로봇 간 Calibration 진행
-> Encoder 1pulse당 Robot Cartesian 기준으로 이동 변위 계산 ( mm/ pulse )
2. 물체가 접근하면 Vision or Sensor를 이용하여 로봇에 신호를 준다.(DIO)
3. 해당 위치를 기준으로 물체의 위치를 계속 업데이트한다.
4. 로봇의 Target을 업데이트하여 Tracking을 진행하며 작업한다.
III. 필요한 기능들
필요한 기능들은 다음과 같다.
1. Conveyor System
Conveyor Tracking을 하기 위한 기타 System들의 기능이다.
- Pulse Data 받기
- Pulse Data를 처리하기
-> Noise로 인한 Filtering 및 속도계산 및 위치 업데이트
- Object 신호 대기하기
- Object Queue 관리
- Object의 Tracking 상태 관리
등등...
2. Conveyor Motion
Object에 실제로 도달하기 위한 Robot의 Motion을 정의한다.
- Conveyor 속도 Catch를 위한 알고리즘
- Conveyor 등속 Tracking 알고리즘
- Robot 감속 알고리즘
- Conveyor 동작 좌표를 로봇의 좌표로 바꾸어 Trajectory 만들기
3. User Interface & Settings
사용자가 사용하기 위한 세팅과 인터페이스
- Conveyor <-> Robot Coordinate Calibration
- Conveyor <-> Robot <-> Vision Calibration
- Object Control의 제한 조건들
4. Conveyor Class 구조 개발...
기타 다른 제어기 코드에 독립적으로 개발이 되어야한다...
IV. 프로젝트 목표
기존에 일부 가지고 있던 System쪽 코드를 Reference로 하여
전체구조부터 새로 설계하여 개발한다. + 일부 Refactoring
Screw 체결같은 지속적인 Tracking 기능개발을 목표로 한다.(협동로봇)
'Project > Conveyor Tracking' 카테고리의 다른 글
| [Project][Conveyor Tracking] 5. Conveyor - Robot Motion Overlap (0) | 2023.01.08 |
|---|---|
| [Project][Conveyor Tracking] 4. Conveyor Motion Algorithm (0) | 2023.01.06 |
| [Project][Conveyor Tracking] 3. Conveyor Class Flow 설계 (0) | 2023.01.06 |
| [Project][Conveyor Tracking] 2. Conveyor Class Struct 설계 (0) | 2023.01.04 |